–í –∫–æ—Ä–∑–∏–Ω–µ –ø—É—Å—Ç–æ!


+7953-586-91-55
11:00 –¥–æ 18:00 –æ–±–µ–¥ —Å 14-15
–ö–∞—Ç–µ–≥–æ—Ä–∏–∏
- FPV
- –ì–æ–Ω–æ—á–Ω—ã–µ FPV –∫–≤–∞–¥—Ä–æ–∫–æ–ø—Ç–µ—Ä—ã
- –ó–∞–ø—á–∞—Å—Ç–∏ –∏ –Ý–ï–ú–û–ù–¢ DJI
- –ö–≤–∞–¥—Ä–æ,–≥–µ–∫—Å–∞,–æ–∫—Ç–æ–∫–æ–ø—Ç–µ—Ä—ã
- –ö–≤–∞–¥—Ä–æ–∫–æ–ø—Ç–µ—Ä—ã DJI,SYMA,MJX
- –ù–æ–≤–∏–Ω–∫–∏
- –°–∞–º–æ–ª–µ—Ç—ã
- –ó–∞–ø—á–∞—Å—Ç–∏ –¥–ª—è –º–∞—à–∏–Ω
- –ú–∞—à–∏–Ω—ã –Ω–∞ —Ä/—É
- –û–ü–õ–ê–¢–ê –ó–ê–ö–ê–ó–ê !
- –ó–∞–ø—á–∞—Å—Ç–∏ –¥–ª—è –≤–µ—Ä—Ç–æ–ª–µ—Ç–æ–≤,–ö–í–ê–î–Ý–û–ö–û–ü–¢–ï–Ý–û–í SYMA MJX
- –ú–∞—Ç–µ—Ä–∏–∞–ª—ã –¥–ª—è –º–æ–¥–µ–ª–µ–π
- –Ý–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ
- –Ý—É–ª–µ–≤—ã–µ –º–∞—à–∏–Ω–∫–∏(—Å–µ—Ä–≤–æ–ø—Ä–∏–≤–æ–¥—ã)
- –≠–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª–∏ –∏ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã (—Ä–µ–≥—É–ª—è—Ç–æ—Ä—ã —Ö–æ–¥–∞)
- –ó–∞—Ä—è–¥–Ω—ã–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞
- –ê–∫–∫—É–º—É–ª—è—Ç–æ—Ä—ã,–ò–Ω–¥–∏–∫–∞—Ç–æ—Ä—ã –ø–∏—Ç–∞–Ω–∏—è
- –ö–æ–Ω—Ç–∞–∫—Ç—ã,–∫–∞–±–µ–ª—å,—Ä–∞–∑—ä–µ–º—ã
- –ö–ª–µ–∏ –∏ —Å–º–æ–ª—ã
- –°—Ç–∞—Ä—Ç–æ–≤–æ–µ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏–µ
- –¢–æ–ø–ª–∏–≤–æ,–º–∞—Å–ª–∞,—Å–º–∞–∑–∫–∏
- –ü—Ä–æ–ø–µ–ª–ª–µ—Ä—ã
- –ê–≤–∏–∞–º–æ–¥–µ–ª—å–Ω–∞—è —Ñ—É—Ä–Ω–∏—Ç—É—Ä–∞
- –ò–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç
- –Ý–∞—Å–ø—Ä–æ–¥–∞–∂–∞
- –ò–Ω—Ç–µ—Ä–µ—Å–Ω—ã–µ —Ñ–∞–∫—Ç—ã
- –ü–æ–¥–∞—Ä–æ—á–Ω—ã–µ —Å–µ—Ä—Ç–∏—Ñ–∏–∫–∞—Ç—ã
- –Ý–µ–º–æ–Ω—Ç –∏ –æ–±—Å–ª—É–∂–∏–≤–∞–Ω–∏–µ
- –ù–µ–º–Ω–æ–≥–æ –æ –º–∞–≥–∞–∑–∏–Ω–µ

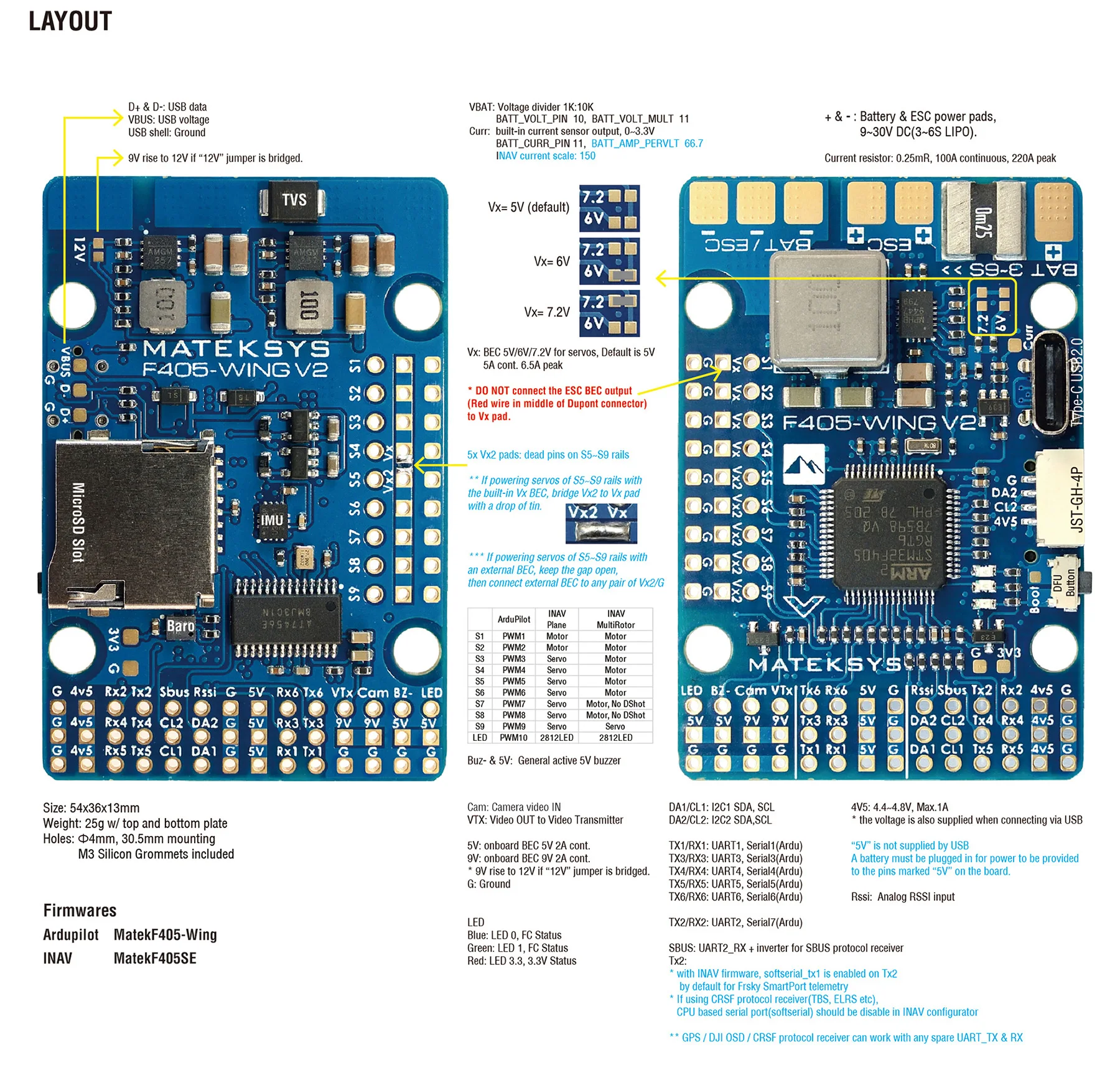
–ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–æ–ª–µ—Ç–∞ MATEKSYS F405 WING V2 STM32
–ú–æ–¥–µ–ª—å: F405
–ù–∞–ª–∏—á–∏–µ: –ï—Å—Ç—å –≤ –Ω–∞–ª–∏—á–∏–∏
–ù–∞–ª–∏—á–∏–µ: –ï—Å—Ç—å –≤ –Ω–∞–ª–∏—á–∏–∏
–¶–µ–Ω–∞: 6 145.00 —Ä.
–ö–æ–ª–∏—á–µ—Å—Ç–≤–æ:
- –∏–ª–∏ -
–≤ –∑–∞–∫–ª–∞–¥–∫–∏
—Å—Ä–∞–≤–Ω–µ–Ω–∏–µ
—Å—Ä–∞–≤–Ω–µ–Ω–∏–µ
–•–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ FC




–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è
–°–ª—É–∂–±–∞ –ø–æ–¥–¥–µ—Ä–∂–∫–∏
–î–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–æ
–õ–∏—á–Ω—ã–π –ö–∞–±–∏–Ω–µ—Ç
–°–≤—è–∑–∞—Ç—å—Å—è —Å –Ω–∞–º–∏
 Ý—É–ª. –í–µ—Å–Ω—ã 7–∞, –Ý–æ—Å—Å–∏—è, –ö—Ä–∞—Å–Ω–æ—è—Ä—Å–∫
–ß–∞—Å—ã —Ä–∞–±–æ—Ç—ã —Å 11-00 –¥–æ 18-00
–û–±–µ–¥ —Å 14-00-15-00
Ý—É–ª. –í–µ—Å–Ω—ã 7–∞, –Ý–æ—Å—Å–∏—è, –ö—Ä–∞—Å–Ω–æ—è—Ä—Å–∫
–ß–∞—Å—ã —Ä–∞–±–æ—Ç—ã —Å 11-00 –¥–æ 18-00
–û–±–µ–¥ —Å 14-00-15-00 Ý+7953-586-91-55
Ý+7953-586-91-55 Ýnmk65@mail.ru
Ýnmk65@mail.ru
–Ý–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ ocStore
–ü–æ–∏–≥—Ä–∞–µ–º - –Ý–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª—è–µ–º—ã–µ –º–æ–¥–µ–ª–∏ –ö—Ä–∞—Å–Ω–æ—è—Ä—Å–∫ © 2024
–ü–æ–∏–≥—Ä–∞–µ–º - –Ý–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª—è–µ–º—ã–µ –º–æ–¥–µ–ª–∏ –ö—Ä–∞—Å–Ω–æ—è—Ä—Å–∫ © 2024





